Sabuk trek robot YongHang mengadopsi proses pencetakan tanpa sambungan dengan vulkanisasi terintegrasi cetakan, menggunakan pita berbentuk cincin yang terbuat dari tiga bahan utama: neoprena, tali serat kaca, dan kain elastis nilon, serta mengadopsi transmisi tipe jala sabuk sinkron, yang memiliki karakteristik tekanan tanah rendah, traksi tinggi, getaran rendah untuk menaiki tangga, kebisingan rendah, kemampuan melewati medan basah yang baik, tidak mudah merusak jalan, dan kecepatan penggerak yang cepat, dll.! Sabuk trek robot terutama digunakan pada robot industri, robot operasi khusus, robot layanan, robot mikro, dan robot perayap cerdas lainnya untuk berjalan, mengatasi rintangan, menaiki tangga, dan tindakan lainnya!
Jenis-jenis sabuk lintasan robot YongHang yang umum dapat disesuaikan:
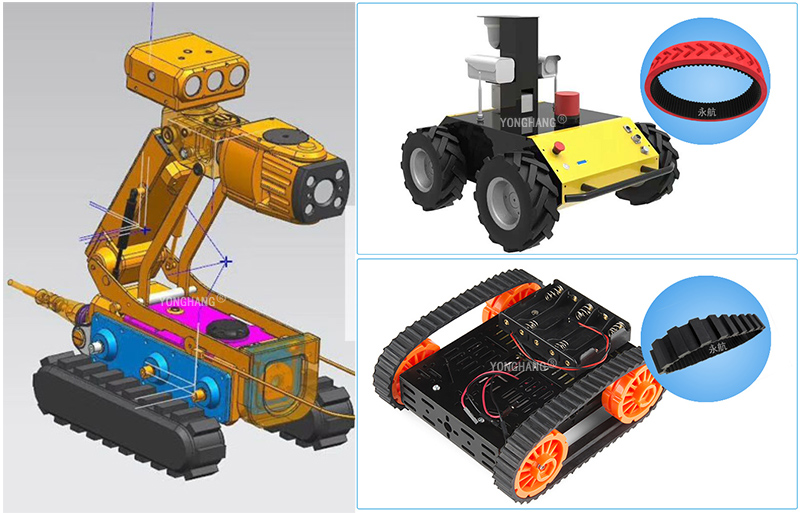
1. Alur permukaan - permukaan karet merah yang dipertebal, alur teratur terbuka, meningkatkan gesekan dan daya cengkeram!
2. Pengalur penebalan permukaan - penebalan sabuk melalui proses vulkanisasi, pembuatan alur, dan penggerindaan pada permukaan untuk membentuk blok persegi, yang berperan sebagai anti selip!
3. Gigi gerinda sabuk bawah - alur gerinda khusus pada permukaan untuk meningkatkan daya cengkeram, gigi gerinda sabuk bawah di kedua sisi agar tetap rata!
Bagaimana cara menyesuaikan sabuk penggerak robot?
1. Kita harus menentukan kelilingnya. Ini dihitung dengan mengalikan jarak pusat antara roda dengan 2, kemudian menambahkan jari-jari kedua roda.
2. Tentukan lebar jalur.
3. Tentukan ketebalannya (biasanya dipilih berdasarkan diameter roda).
4. Tentukan bentuk lintasan. Pilihan umum meliputi sabuk sinkron, sabuk multi-V, dan sabuk datar sebagai dasarnya, dengan pola tapak karet khusus yang diterapkan pada permukaan untuk mencapai koefisien gesekan yang dibutuhkan.
Berikut adalah beberapa kasus yang telah kami tangani. Jika Anda juga membutuhkan trek robot khusus, silakan hubungi kami.![Bagaimana cara menyesuaikan sabuk penggerak robot? 1]()
Silakan hubungi kami langsung untuk informasi lebih lanjut mengenai kebutuhan spesifik Anda.
URL video: http://www.yhbelt.com
WhatsApp & WeChat:+0086 13725100582
Email:sales@yhbelt.com