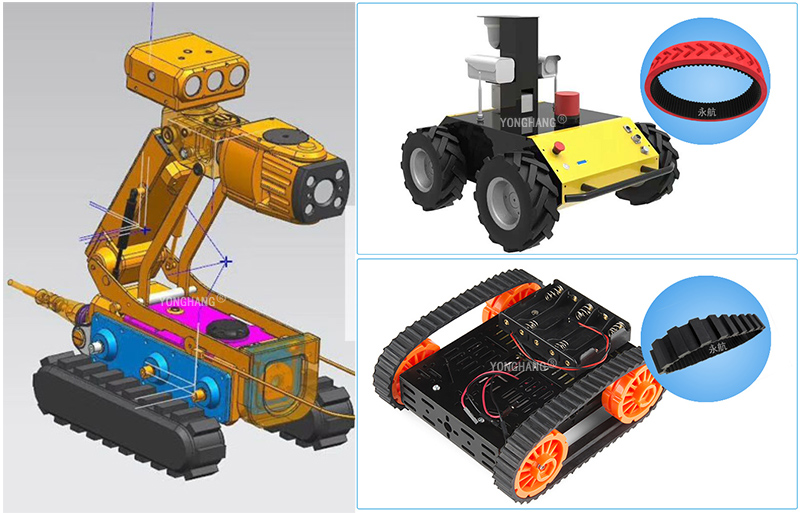
สายพานตีนตะขาบหุ่นยนต์ YongHang ใช้กระบวนการขึ้นรูปไร้รอยต่อแบบหลอมรวมแม่พิมพ์ (mold integrated vulcanization) โดยใช้เทปรูปวงแหวนที่ทำจากวัสดุหลักสามชนิด ได้แก่ นีโอพรีน เชือกใยแก้ว และผ้าไนลอนยืดหยุ่น และใช้ระบบส่งกำลังแบบสายพานซิงโครนัส ซึ่งมีคุณสมบัติเด่นคือ แรงกดบนพื้นต่ำ แรงฉุดสูง การสั่นสะเทือนต่ำสำหรับการปีนบันได เสียงรบกวนต่ำ สามารถวิ่งบนพื้นเปียกได้ดี ไม่ทำให้พื้นถนนเสียหายง่าย และมีความเร็วในการขับเคลื่อนสูง เป็นต้น! สายพานตีนตะขาบหุ่นยนต์ส่วนใหญ่ใช้ในหุ่นยนต์อุตสาหกรรม หุ่นยนต์ปฏิบัติการพิเศษ หุ่นยนต์บริการ หุ่นยนต์ขนาดเล็ก และหุ่นยนต์ตีนตะขาบอัจฉริยะอื่นๆ สำหรับการเดิน การเอาชนะอุปสรรค การปีนบันได และการกระทำอื่นๆ!
สายพานตีนตะขาบสำหรับหุ่นยนต์ YongHang ที่สามารถปรับแต่งได้ตามต้องการ:
1. ร่องบนพื้นผิว - พื้นผิวทำจากยางสีแดงหนา มีร่องเปิดสม่ำเสมอ ช่วยเพิ่มแรงเสียดทานและแรงยึดเกาะ!
2. การเซาะร่องเพิ่มความหนาบนพื้นผิว - การเพิ่มความหนาของสายพานด้วยการวัลคาไนซ์ การเซาะร่อง และการเจียรบนพื้นผิวเพื่อสร้างเป็นบล็อกสี่เหลี่ยม ทำหน้าที่ป้องกันการลื่นไถล!
3. ฟันเจียรสายพานด้านล่าง - ร่องเจียรพิเศษบนพื้นผิวเพื่อเพิ่มการยึดเกาะ ฟันเจียรสายพานด้านล่างทั้งสองด้านเพื่อรักษาความเรียบ!
วิธีปรับแต่งสายพานลำเลียงของหุ่นยนต์?
1. เราต้องหาเส้นรอบวงก่อน ซึ่งคำนวณได้โดยการคูณระยะห่างระหว่างจุดศูนย์กลางของล้อทั้งสองด้วย 2 แล้วบวกด้วยรัศมีของล้อทั้งสอง
2. กำหนดความกว้างของรางรถไฟ
3. กำหนดความหนา (โดยทั่วไปจะเลือกตามเส้นผ่านศูนย์กลางของล้อ)
4. กำหนดรูปทรงของราง โดยทั่วไปมักใช้สายพานแบบซิงโครนัส สายพานแบบมัลติวี และสายพานแบนเป็นพื้นฐาน และใช้ยางที่มีลวดลายพิเศษบนพื้นผิวเพื่อให้ได้ค่าสัมประสิทธิ์แรงเสียดทานที่ต้องการ
ด้านล่างนี้คือตัวอย่างบางส่วนของงานที่เราเคยทำ หากคุณต้องการรางหุ่นยนต์แบบสั่งทำพิเศษ โปรดติดต่อเรา![วิธีปรับแต่งสายพานลำเลียงของหุ่นยนต์? 1]()
โปรดติดต่อเราโดยตรงเพื่อขอข้อมูลเพิ่มเติมเกี่ยวกับความต้องการเฉพาะของคุณ
ลิงก์วิดีโอ: http://www.yhbelt.com
Whatapp&wechat:+0086 13725100582
อีเมล :sales@yhbelt.com