تعتمد أحزمة مسارات الروبوتات من يونغ هانغ عملية التشكيل السلس بتقنية الفلكنة المتكاملة، وتعتمد شريطًا حلقيًا مصنوعًا من ثلاثة مواد رئيسية: النيوبرين، وحبل الألياف الزجاجية، وقماش النايلون المرن. كما تعتمد نظام نقل الحركة المتزامن، ما يمنحها خصائص مميزة مثل انخفاض ضغطها على الأرض، وقوة جرها العالية، وانخفاض اهتزازها عند صعود السلالم، وانخفاض مستوى الضوضاء، وسهولة مرورها في الأراضي الرطبة، وعدم إتلافها للطريق، وسرعتها العالية. تُستخدم أحزمة مسارات الروبوتات بشكل أساسي في الروبوتات الصناعية، وروبوتات العمليات الخاصة، وروبوتات الخدمة، والروبوتات الصغيرة، وغيرها من الروبوتات الزاحفة الذكية للمشي، وتجاوز العوائق، وصعود السلالم، وغيرها من المهام.
أنواع شائعة قابلة للتخصيص من أحزمة مسارات روبوتات يونغ هانغ:
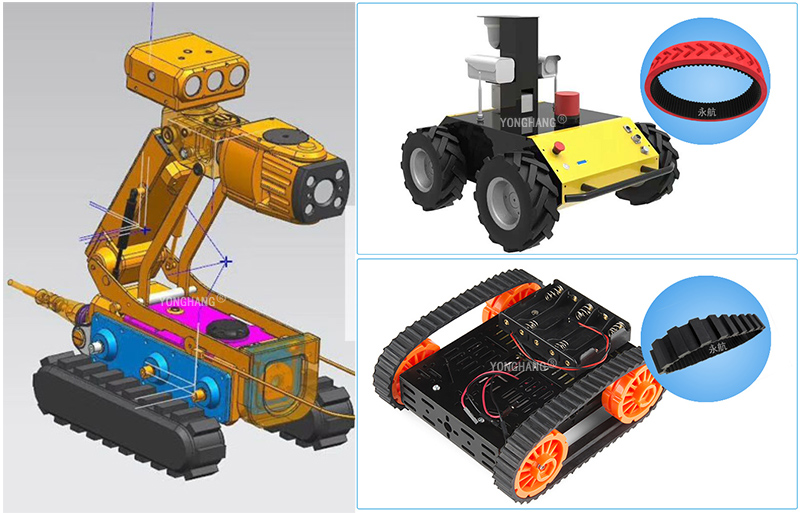
1. أخاديد سطحية - سطح مطاطي أحمر سميك، أخاديد منتظمة مفتوحة، تزيد من الاحتكاك وقوة التماسك!
2. سماكة السطح عن طريق التخديد - سماكة الحزام عن طريق عملية الفلكنة، والتخديد والطحن على السطح لتشكيل كتلة مربعة، تلعب دور منع الانزلاق!
3. أسنان طحن الحزام السفلي - أخاديد طحن خاصة على السطح لتعزيز التماسك، وأسنان طحن الحزام السفلي على كلا الجانبين للحفاظ على السطح المستوي!
كيفية تخصيص سير مسار الروبوت؟
1. يجب علينا تحديد المحيط. يتم حساب ذلك بضرب المسافة المركزية بين العجلتين في 2، ثم إضافة نصف قطر كلتا العجلتين.
2. تحديد عرض المسار.
3. تحديد السماكة (يتم اختيارها عادةً بناءً على قطر العجلة).
4. تحديد شكل المسار. تشمل الخيارات الشائعة الأحزمة المتزامنة، والأحزمة متعددة الأشكال، والأحزمة المسطحة كأساس، مع أنماط مداس مطاطية متخصصة يتم تطبيقها على السطح لتحقيق معامل الاحتكاك المطلوب.
فيما يلي بعض الحالات التي تعاملنا معها. إذا كنتم بحاجة أيضاً إلى مسارات روبوت مخصصة، فيرجى التواصل معنا.![كيفية تخصيص سير مسار الروبوت؟ 1]()
يرجى الاتصال بنا مباشرة للحصول على مزيد من المعلومات حول متطلباتك الخاصة.
رابط الفيديو: http://www.yhbelt.com
واتساب وويشات:+0086 13725100582
بريد إلكتروني :sales@yhbelt.com